













灾难环境下信息快速获取空投机器人系统研究(组图)
引言
地震及化工厂爆炸等灾难发生后,往往道路与通信中断、有毒气体弥漫,救援人员难以进入灾难地区,而且由于雷雨等多变的天气和多次的余震,卫星成像的准确性极大下降,获取灾难信息非常困难,灾害发生后的72小时是救援的黄金时间[1],因此及时探测灾区的第一手现场信息对于营救和全局调度具有重要作用。
传统的灾后救援主要依靠人力辅以动物进行灾后搜寻和救助,这需要大量的人力、物力和时间,尤其在某些危险、恶劣、复杂的环境下,人根本无法完成检测、侦察和作业等任务。为了避免情况不明而造成的人员伤亡和物质损失,同时也为政府职能部门提供较全面的受灾信息、提高救灾效率,救灾机器人辅助救援目前已成为能采用的有效手段之一[2]。世界上许多国家对于救灾、救援机器人进行了深入研究,以利用机器人来辅助甚至替代人类进行灾前预警、灾后搜寻和救援等工作[3]。
灾难环境下信息快速获取空投机器人可以克服复杂天气和多变环境的影响,能够在第一时间通过空投进入灾难现场。通过机器人自身携带的各种传感器,如摄像头、语音交互系统及各种有毒气体传感器等,探测灾难现场的情况、及时探测灾区的第一手现场信息,这对于营救和全局调度具有非常重要的作用。
1. 灾难救援机器人研究现状与发展趋势
1.1 灾难环境概述
我国70%以上的城市、50%以上的人口分布在气象、地震、地质及海洋等自然灾害严重的地区[4]。这些年来发生的重大自然灾害,更是给人民生命财产和经济社会发展造成了重大损失。特别是2008年5月12日,四川汶川发生的特大地震,给受灾地区群众生命财产和经济社会发展造成了重大损失。由于灾区通信和交通中断,空降兵伞降进入灾区,执行通信联络、灾情勘察和情况上报任务,为上级决策提供了依据。但是,伞降救援险象环生,在这种极端条件下,空投士兵具有极大的危险性。因此,将机器人技术、营救行动技术及灾难学等多学科知识有机融合,研制用于搜寻和营救的灾难救援机器人具有非常重要的意义,也是机器人学研究中一个富有挑战性的新领域。基于汶川地震的特大灾情,胡锦涛总书记指出:“要加快遥感、地理信息系统、全球定位系统、网络通信技术的应用以及防灾减灾高技术成果转化和综合集成,建立国家综合减灾和风险管理信息共享平台,完善国家和地方灾情监测、预警、评估、应急救助指挥体系”[5]。
1.2 救援机器人技术现状与发展
1995年发生在日本神户-大阪的大地震,及其之后发生在美国俄克拉荷马州的阿尔弗德联邦大楼爆炸案揭开了救援机器人技术研究的序幕,在救援机器人技术发展史上具有里程碑式的重要意义[6]。尤其是机器人在美国“9•11”事件中的成功应用,引发了人们研究救援机器人的热潮,至今在各种期刊与杂志上已经有大量的研究成果,理论和实际应用都取得了很大的进步。目前,世界各国已研制出了各式各样的救援机器人系统,并在实践方面积累了丰富的经验。
日本在救援机器人方面开展了相对全面的工作,在灾难救援防护方面已经形成了完备的国家体系。日本东京工业大学的广濑研究室研制出了SOURYU-I和SOURYU-II型救援机器人[7-8]。这两种机器人能够在充满瓦砾的狭小场所移动、探察并确定受灾者的位置。KAMEGAWA等人提出了一种新的救援机器人平台[9-10]。该机器人由多节履带车连接而成,能够进入狭窄的空间,具有很好的越障能力和地面适应能力。电气通信大学研制出了一种信息搜集用机器人MA-1[11]。神户大学研制的UMRS系列机器人[12]。旨在将机器人用于废墟瓦砾中的探察作业。同时,日本的一些大公司也介入了救援机器人的研究和开发。SMERT-M[13]是东芝公司研发的一种用于狭窄空间进行检测和危险现场搬运作业的机器人,可以搬运5kg左右的重物。Tmsuk公司研发的一种巨型救援机器人“援龙” [14]。它在发生火灾时可以清除瓦砾、完成推土机或铲车无法承担的精细作业。
在美国,尤其是在“9•11”事件,灾难救援机器人技术日益受到重视,灾难现场救援被认为是灾难救援机器人的第一次实际应用。其中,Inuktun公司投入使用了Micro VGTV、Micro Traces和Mini Traces三种机器人[15] ,特点是体积小,重量轻,适合在废墟堆上使用,Micro VGTV和Micro Traces被证明更适宜于救援作业。Foster-Miller公司使用了Talon、SOLEM和Urbot三种机器人系统[15] : SOLEM被用于废墟堆中的作业;Talon和Urbot被用于建筑物的内部检测,它们具有较好的传感和承载能力,而且移动速度较快。同时,美国的许多高校研究中心、国家研究机构和公司也进行了救援机器人的研究。南佛罗里达大学研制出了安装有医学传感器的救援机器人Bujold[16] ,它能够在灾难现场获取幸存者的生理信息和环境信息,并将其传送到外界。其底部采用了可变形履带,使得驱动具有较高的运动和探测能力。明尼苏达州大学研制出了一种特殊的机器人SCOUT[17] ,它具有简单的传感单元、运动单元和专门的作业工具,该机器人外表的弹性防护轮具有保护作用。南加利福尼亚大学研制出了一种模块化可重构的救援机器人CONRO [18] ,它可以根据灾难现场环境的需要重组成蛇形、六足形及环行等多种构形。救援机器人Urbie[19]系列能够用于城市灾难环境探测的救援作业,特别是采用轮、腿、履带复合式的移动机构使机器人具有更强的运动能力。同时,用于灾难救援和探测的无人自主直升机在美国也得到众多研究者的重视, CMU(卡内基梅隆大学)研制的无人自主直升机能够迅速、系统地大面积搜索,准确判断灾情以及发生事故或灾后受灾者的位置,从而指导救援队伍的行动方向,特别适应于森林火灾、海难、污染地区和放射性地区的救援作业[20] 。
国内的许多高校和研究所在海难救援机器人、自主救援无人机和地面移动特种作业机器人等救援机器人技术方面也开展了广泛的研究工作。如:2002年由上海消防研究所、上海交通大学和上海消防局三家单位共同承担的国家863项目“履带式、轮式消防灭火机器人” [6]研制成功并顺利通过验收。在国家863计划资助下,中科院沈阳自动化所研制了蛇形机器人、水面救援机器人及基于复合机构的非结构环境移动机器人等。2005年,中科院沈阳自动化研究所与日本国际灾难救援系统研究院联合成立了“中日救援及安全机器人技术研究中心”,实现了强强联合,有效推动了机器人技术在灾难救援中的应用。哈尔滨工业大学研制了多种灾难援救机器人[21] ,如为开滦煤矿研制的履带式煤矿事故抢险探测机器人,采用履带加前后摆臂的运动方式,同时对机器人进行了防水、防爆以及电磁兼容等可靠性设计,并且该机器人本体携带了易爆气体、温度及风速等传感器;研制的轮足复合式移动机器人全面综合了轮式机器人运动速度快、足式机器人越障能力强等优点,可用于危险环境的检测;研制的军民两用小型探测机器人广泛用于灾难信息的收集。国防科技大学在2001年研制了一种蛇形救援机器人[22] 。中国矿业大学于2006年研制了我国第一台用于煤矿救援的CUMT-1型矿井搜救机器人[23] 。西安邮电学院研制出了一种可用于矿难救援的机器人[24] 。清华大学、北京航空航天大学、西安交通大学和上海交通大学等高校也开展了相关技术的研究。
2. 国内外空投技术研究概况
空投是利用降落伞将人员和物资投送到指定地点的一种技术。20世纪中后期,利用空投技术进行空降作战曾是一种主要的奇袭战术,进入21世纪,情况依然如此[25] 。
美国MMIST公司研制的“夏尔巴人(Sherpa)”机器人降落伞[26] ,是一种高空滑翔、空气冲压降落伞投送系统。它配备有GPS导航系统和电子控制系统,伞绳与一个装备有两台马达的控制模块相连接,能够精确地降落在预定区域,其空投精度优于100m。Vertigo公司研制的低成本制导空投系统AGAS [26] ,包含有制导、导航、控制、风探测器及机电式降落伞上升作动系统等,是一种低滑行轨迹控制系统,其特点是成本很低,可使用现有的降落伞和A-22空投包裹。2003年,AGAS进行过演示,它能将6个载荷投送到目的地,精度为26m,投送高度为3000m。美国STARA技术公司研制的通用投送系统GDS[26] ,是一种小型自主制导空投系统,它能够投放重量为0.454~182kg的载荷,投放精度为30m。
荷兰空间公司开发的“黑桃”小伞衣自主投送系统[27] ,包括160kg、250kg等多种型号,可使用GPS和不同的降落伞。在2004年进行的空投试验中,其精度优于100m,系统投掷距离与投掷高度之比为3:1。
欧洲EADS公司与美国Prescott产品公司合作研制的SLG-Sys自主滑翔伞降系统 [27] ,是一种可以全天候执行投送人员和装备任务的空投系统。该系统不仅能够空投250~2000kg的军用货物,如车辆、武器装备、人道物资等,而且还能够帮助特种兵在夜晚、天气恶劣或不利地形的情况下,在9000m高空从运输机上跳伞,精确降落在50km外的着陆点。
气囊缓冲与火箭反挚缓冲技术在空投着陆方面非常关键[28] 。气囊缓冲技术在无人机回收中得到了成功应用。无人机在回收降落伞的作用下,将飞机稳定着陆速度减低到约6m/s,然后利用着陆缓冲装置来缓释6m/s着陆所带来的冲击能量,降低着陆过载,避免损伤。无人机着陆缓冲减震气囊是利用一种具有非弹性、柔性和不透气材料制成的可充气囊体系统[29] 。
在无人机飞行过程中,气囊被折叠放置在飞机内部。当伞降回收时,在适当的时机,减震气囊被放出展开并充气至初始压力,于是当无人机着陆时,气囊在冲击载荷作用下囊内气体被压缩产生变形,吸收无人机冲击能量,然后通过排气装置排除囊内气体,及时释放所吸收的能量,从而达到缓冲无人机冲击过载及保护无人机回收安全的目的。由于其重量轻、充气前可折叠成小体积收藏,容易实现小的减速过载等特点而得到无人机设计师的普遍青睐。在无人机上应用该项技术的研究始于20世纪60年代,如美国的USD-5无人侦察机、AQM-34V无人侦察机[30] 、加拿大的CL-89战地无人侦察机[31]等无人机均采用气囊缓冲减震技术。
伞降-气囊回收的可靠性强,在航空航天领域应用前景广阔。在国内,气囊减震技术主要应用于空投物资,在无人机回收中较为成熟和使用较多的是滑撬减震器式减震方式,如ASN-206、ASN-105和ASN-7[32]等。
中航工业航宇救生装备有限公司是我国一家从事航空防护救生、空降空投装备研制的现代高科技产业集团,在气囊缓冲与火箭反挚缓冲技术方面居于国内领先地位,目前已经进行了大量相关研究并开发了一些产品[33] 。该公司研制的多型重装空投系统均采取了自落式缓冲气囊的缓冲方式,某型直升机应急漂浮系统则采用了高压氦气充气气囊的缓冲方式。
3. 一种灾难环境下信息快速获取空投机器人系统的研制
3.1 空投机器人系统介绍
天津职业技术师范大学、南开大学和航宇救生装备有限公司联合开发了一种灾难环境下信息快速获取空投机器人系统,该空投机器人系统由机器人本体系统、着陆缓冲系统、飞机运输与伞降系统及信息采集传输系统组成,能够将机器人精确空投在预定区域。通过GPS或北斗星定位导航,空投前预先设定着陆坐标,空投后控制系统自动分析当前坐标和预定坐标及风向、风速等参数,修正姿态和飞行路线,实现精确着陆,也可通过手动遥控控制,即通过摄像头传回当前飞行情况,控制人员进行遥控作业,修正飞行路线和姿态,以选择合适的着陆点,从而实现精确着陆。
空投机器人本体具有抗震、防水和防火功能,携带了多种传感器,如图1所示。该系统采用履带行走方式,可以适应较为复杂的环境,可以顺利越障、爬楼梯等,履带材料为高分子阻燃材料;驱动方式采用后轮驱动、差速转向,运动控制灵活,可以实现原回转;摄像头可以水平360°回转,俯仰±45°;空投机器人摆臂时采用履带形状可变结构,通过摆臂的运动来改变形状,以适应不同的地形,并将拖带轮与摆臂进行联动,以补偿履带周长的变化。
为了保证在着陆过程中机器人的安全,设计了一种新型软着陆器,如图1所示。该软着陆器由蜂窝纸板减震方案与水平缓冲机构组成。蜂窝纸板是一种具有高度压缩与复原性的粘弹性材料,缓冲性能好,能够充分吸收由机器人系统重力和惯性所产生的能量,从而防止机器人系统在落地瞬间遭受冲击。同时,研究团队研制了一种新型缓冲装置,克服了机器人系统在落地时所受到的水平冲击。当机器人系统安全着陆后,软着陆器自动与机器人本体实现脱离。

图1 空投机器人本体及软着陆器
在空投以及移动探测过程中,为了保证双向信息交互系统的可靠性,该空投机器人系统的信息采集传输系统采用了基于COFDM技术的无线图像传输方案,提供了高质量的实时图像和声音。采集发射端置于着陆器机器人中,通过音视频数字化实时图像传输,迅速将现场实况声像信息传送回救援中心。机器人运动控制指令的可靠传输采用远程无线遥控来实现。
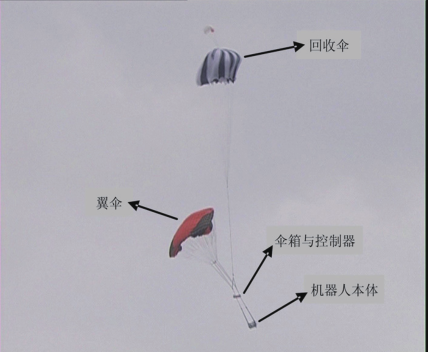
图2 伞降系统构成

图3 伞降空投过程
伞降系统由翼伞、回收伞、伞箱和控制器构成,如图2所示。翼伞同普通圆伞的区别在于翼伞具有更好的可操纵性,通过伺服电机实现下拉伞衣后缘两侧的操纵绳来改变翼伞的气动特性,包括实现单侧下拉的转弯操纵、双侧下拉的减速及雀降控制,进而改变翼伞在空中的运动姿态。回收伞就是一种普通的圆伞。伞降空投过程如图3所示,空投机器人系统从飞机舱门投出,利用翼伞进行盘旋自寻飞行,当到达目标点后控制系统启动,回收伞弹出并张满,此时翼伞失效。通过回收伞使机器人本体系统降落于预先指定地点,机器人本体系统安全着陆后回收伞与机器人本体系统自动脱离,机器人本体从软着陆器中驶出。
3.2 主要研究内容
首先,进行空投机器人本体的抗震、防水和防火的可靠性设计,在此基础上进行复杂地形下机器人机动能力与存活能力的研究。
其次,进行机器人空投过程及机器人执行任务时的智能控制研究,针对地形特征、翼伞滑行方向与距离的控制策略,研究伞降中自动脱扣控制过程以及准确实时测定伞的空中高度,伞降控制单元对伞降过程及着陆后的周围环境进行实时监测与调整。
然后,研究通信环境被完全破坏的情况下,空投机器人获取现场信息后如何进行信号的小功率远距离传输,如何消除多径干扰所引起的音视频信号失真现象,以及在复杂通信环境下如何实现远距离无线控制机器人的运动。
最后,研究能够使机器人安全着陆并能自动与机器人分离的软着陆器,实验证明,该软着陆器不仅能够充分吸收着陆时的冲击能量,而且可以使机器人着陆后的各项性能与信息收集活动不受影响。
3.3 关键技术
该空投机器人系统研究涉及伞降技术、控制技术、通信技术及机器人技术等。伞降技术突破了目前传统的伞降方式,采用现代控制理论等多种算法控制伞降姿态,该技术还可应用于紧急救援物资准确投放和无人机、航空器回收等领域。
控制技术将嵌入式系统应用于航空及机器人控制中,采用神经网络在线学习进行参数辨识,并采用有约束的模型预测控制策略,对伞降过程和机器人运动进行控制。该技术可广泛应用于航空航天、军事和其他控制领域。
通信技术解决了复杂工况下长距离可靠双向人机通信,此技术可应用于交通运输、工业控制、军工等领域。
在机器人技术中,机器人本体采用了模块化设计以及防震、防水和防火措施,这些技术成熟之后还可采用于其他工业、军事及交通领域等。灾难环境下信息快速获取空投机器人系统,有完全的自主知识产权,所涉及的上述技术以及各个子系统技术将随着空投机器人整体系统的完善而发展成熟,进而产业化,这必将带来极大的经济效益。
4 结论
防灾、减灾和救灾,事关人民生命和财产安全,是国家公共安全的重要组成部分。信息快速获取空投机器人可以在极其危险、恶劣的灾难救援环境下,代替和协助救助人员执行相关作业,其应用十分广阔,不仅能够用于城市救援、消防、公安、采矿和环保等领域,同时在国防、军事和星球探测等方面也有着良好的应用背景。因此,信息快速获取空投器人系统及其相关技术是机器人学中的一个新兴研究课题,也是国家发展迫切需要的核心技术之一,在国民经济和安全中起着重要的作用,具有重大的战略意义。
参考文献
[1]李斌. 蛇形机器人的研究及在灾难救援中的应用[J]. 机器人技术与应用, 2003,(3): 22-26.
[2]董晓坡,王绪本. 救援机器人的发展及其在灾害救援中的应用[J].防灾减灾工程学报,2007,27(1) :1-7.
[3]钱善华,葛世荣,王永胜等. 救灾机器人的研究现状与煤矿救灾的应用[J]. 机器人, 2006,28(3): 20-22.
[4]灾难考验中国 舟曲泥石流玉树地震等2010年自然灾害警示录[EB/OL]. [2010-09-10].http:// gansu.gansudaily. com .cn/system/2010/09/10/011689165.shtml.
[5]胡锦涛.在中国科学院第十四次院士大会和中国工程院第九次院士大会上的讲话[EB/OL]. [2008-06-23]. http://news.xinhuanet.com/newscenter/2008-06/23/content_8424606.htm
[6]刘金国,王越超,李斌等. 灾难救援机器人研究现状、关键性能及展望[J]. 机械工程学报,2006, 42(12):1-11
[7]Hirose S. Snake, walking and group robots for super mechanosystem[C]//IEEE International Conference on Systems, Man andCybernetics, Piscataway: IEEE, 1999: 129-133.
[8]Hirose S, Fukushima E F. Development of mobile robots for rescueoperations [J]. Advanced Robots, 2002, 16(6):509-512.
[9] Ye C L, Ma S G, Li B. Development of a shape-shifting mobile robotfor urban search and rescue [J]. 机械工程学报(英文版), 2008,(2).
[10]Kamegawa T, Yamasaki T, Sato N, et al. Sequentialy connectedmultiple-unit rescue robot platform[C]//First International Workshopon Synthetic Simulation and Robotics to Mitigate Earthquake Disaster,Padova,July 5th, 2003, Rome, 2003:29-30.
[11]Yang Z X, ITO K, Saijo K, et a1. A rescue robot for collectinginformation designed for ease of use[J] .Advanced Robotics,2005,19(3):249-272.
[12]Takamori T, Kobayashi S, Ohira T, et al. Development of UMRS(Utility Mobile Robot for Search) and searching system for suffererswith cell phone [C]// Systems and Human Science ,for Safety, Security,and Dependability: Selected Papers of the 1st International Symposium,Amsterdam Boston: Elsevier, 2005: 47-52.
[13]Yuguchi Y, Satoh Y. Development of a robotic system for nuclearfacility emergency preparedness-observing and work-assisting robot system[J]. Advanced Robotics, 2002,16(6):481-484.
[14]大型灾难救援机器人援龙 [EB/OL]. http://pc.watch.impress.co.jp/docs/2004/0325/ tmsuk.htm.
[15] Micire M.Analysis of the robotic-assisted search and rescue response to the World Trade Center Disaster [D]. South Florida: University of South Florida, 2002.
[16]Murphy R R.Marsupial and shape-shifting robots for urban search and rescue[J].IEEE Intelligent Systems and their Applications, 2000,15(2):14-19.
[17]Stoeter S A, Rybski P E, Gini M. Autonomous stair-hopping with scout robots[C]//IEEE/RSJ International Conference on Intelligent Robotics and Systems. Lausanne, Switzerland, 2002: 721-726.
[18]Shen W M, SALEMI B, WILL P. Hormone-inspired adaptive communication and distributed control for CONORO self-reconfi gurable robots [J]. IEEE Transactions on Robotics and Automation,2002,18(5):700-712.
[19]Urbie The Stair Climbing Robot [EB/OL]. http://www.cis.upenn.edu/cjtaylor/RESEARCH/projects/Urbie/Urbie.html.
[20]Autonomous Helicopter Project [EB/OL]. http://www.cs.cmu.edu/afs/cs/project/chopper/www/capability.html.
[21] 孙久伟. 多节履带式煤矿井下搜索机器人本体设计及运动分析[D].黑龙江: 哈尔滨工业大学, 2009.
[22]“蛇形机器人”制造者心愿:危难之处显身手[EB/OL]. http://news.sina.com.cn/s/ 2001-11-28/408328.html.
[23]葛世荣,张德坤,朱真才等. 矿山运输机械的安全装备研究[J].中国科技论文在线,2007,2(7): 480-486.
[24]王忠民,刘军,窦智等. 矿难救援机器人的研究应用现状与开发[J]. 煤矿机械, 2007, 28(11): 6-8.
[25] 赵福英. 从“天女散花”到“定点投送”—高空精确空投技术的最新发展[J]. 现代兵器, 2005, (5): 18-21
[26]邹辉.精确空投系统的发展[EB/OL]. (2005-10-25). http://military.china.com/zh_cn/xdjs/04/11033358/20051025/12783522-2.html.
[27]张锋,王海涛. 欧美精确空投系统[J]. 兵工自动化,2007,26(6).
[28]于成果,李良春. 空投安全着陆的实现途径[J]. 包装工程,2007,28(10).
[29]王立荣,徐雷麟. 仿真技术在6自由度并联机器人运行中的应用[J].中国纺织大学学报,1999,25(6): 29-32.
[30] Turner C T, Girard Jr L A. Air bag impact attenuation system for the AQM -34V RPV, AIAA 81-1917R,1981.1-2.
[31]刘鑫,韩旭,刘桂萍等. 基于微型多目标遗传算法的气囊缓冲特性优化[J].中国机械工程,2009,20(15):
1819-1822.
[32]张元明.无人机回收减震气囊的理论研究[J].液压与气动.2005, (1):7-9.
[33]中航工业航宇救生装备有限公司[EB/OL].http://www.china-ali.com/product/aviation/product_c.htm
分享到:
[来源:《机器人技术与应用》双月刊责任编辑:黄淑婉]

官方微信号:tezhongzhuangbei
立即关注特种装备网官方微信,
第一时间了解行业权威资讯和商机信息!
第一时间了解行业权威资讯和商机信息!

官方微博:特种装备网
关注我们,了解实时动态,与我们互动!





