













地面排爆机器人的应用(组图)
地面排爆机器人主要用于代替人工,直接在案发现场排除和处理爆炸物以及其他危险品,也可以对一些持枪的恐怖分子及犯罪分子实施有效攻击,是排爆专业队伍中必不可少的重要装备。
一、排爆工作的基本程序
排除爆炸可疑物品是一项细致复杂,危险性高的工作。从排爆工作涉及的装备来看,主要有排爆车、排爆机器人、爆炸物销毁器、频率干扰仪、X射线透视成像仪、车载防爆球罐、排爆服、排爆工具组等。当发现爆炸物时,排爆车(一般采用中型面包车)将排爆整套系统装备及排爆人员快速运到案发现场。到达现场后,迅速将排爆机器人从排爆车上开下来,并将其他排爆装备搬下来:
首先打开无线电频率干扰仪,置放在离爆炸物一定的距离范围之内。随着无线电通讯设备的高速发展和普及,犯罪分子大都采用各种无线电遥控装置制造的遥控炸弹进行恐怖爆炸活动。而无线电频率干扰仪能有效地干扰各类手机、呼机、对讲机、小灵通、遥控玩具、遥控车锁、各种遥控系统等多种频率的无线电通讯信号,使利用上述现代通讯手段制造的遥控爆炸物引爆装置的无线电指令信号失效,排除遥控爆炸物引爆的可能性,从而保障排爆工作的 顺 利 进 行。无线电频率干扰仪有两种类型,一种为手提便携式(图1),一种为车载式(图2)。手提便携式由排爆人员手提放在离爆炸物合适的位置;车载式安装在排爆车上,功率大,干扰信号覆盖面积大,应用更加机动方便。其主要技术参数如下:手提便携式干扰仪:
干扰频率范围全频覆盖,输出功率500W,有效干扰半径50米。
车载式干扰仪;干扰频率范围全频覆盖,输出功率1000W,有效干扰半径50-200米。

图1 便携式无线电频率干扰仪

图2 车载无线电频率干扰仪
其次,用X射线透视成像仪对爆炸物进行透视,观察爆炸物中引爆装置的类型和具体位置,为确定排除方法提供依据。目前最先进的便携式X射线透视成像仪,对爆炸物的透视状况可以通过无线发射,在笔记本电脑中得以接收,并可以进行不同层次不同色彩的调节,清晰分辨出爆炸物内部结构,其无线操作范围在100-300米之间。
目前,无线电频率干扰仪和X射线透视成像仪由于体积偏大和价格偏高的原因还没有装备在排爆机器人上。但随着技术的提高,最终它们将安装在排爆机器人上,应用起来更加方便。
在排爆方案确定后,一般有人工排爆和机器人排爆2种方法。人工排爆是传统的排爆法,并且现在仍在应用。机器人排爆必需在装备了排爆机器人的排爆专业队中才能采用,这是排爆工作发展的方向和今后必需配备的高科技排爆装备。人工排爆是由排爆专业人员身穿排爆服有效地保护自己,利用人工排爆竿、人工排爆机械手、无磁排爆工具组等进行排爆工作。
机器人排爆就是排爆机器人代替人工排爆。由于高新技术在排爆领域中的应用,地面反恐排爆机器人已逐渐成为排爆工作的重要装备。Super-DⅡ型排爆机器人是国家863计划项目,由北京中泰通科技发展有限公司和上海交大联合研制的具有自主知识产权的最新产品,2004年6月23日在北京展览馆参加了第二届国际警用装备博览会,展示了它的优势功能和动作。
对爆炸物的处置有就地销毁和转移后销毁等方法。就地销毁就是用爆炸物销毁器在案发现场直接摧毁。转移后销毁就是由排爆机器人将爆炸物抓起来放入车载防爆球罐中,运到安全的地方进行销毁。车载防爆球罐(图3)由特殊钢材制成,一般的爆炸物就是在其中爆炸也不会将其炸毁,故十分安全可靠。
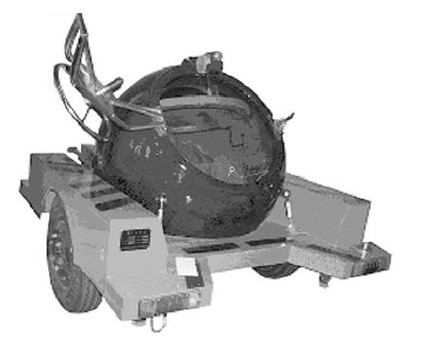
图3 车载防爆球罐
二、排爆机器人的应用
Super-DⅡ型排爆机器人采用了先进的PLC计算机与传感器、继电器控制技术和复杂的三臂杆六自由度的多功能工作装置,具有多方面的优势技术。
1.联动功能
现有的国内外排爆机器人的每一个关节自由度的控制和操作都是由控制面板上的单个按键开关进行操作。因此,机械手臂要到达爆炸物的确定位置必须由排爆操作人员手急眼快地操纵多个开关实现机械手臂的运动过程,运动速度的快慢和连续性靠操作人员的熟练程度决定,即使操作程度很熟,要达到连续的满意性也较难。Super-DⅡ 型排爆机器人在工作装置中的三臂杆六自由度(六个电机)涉及的运动范围(基坐标与子坐标)之内提出了联动功能的设计与完成。所谓联动就是三臂杆六自由度以各自不同的位置姿态(不同的方位、不同的角度、不同的时间、不同的速度)为了到达同一个具体点位(爆炸物所在位置)而依次、连续、协调一致地按照所需的路径(程序)共同自动地配合动作。在操作面板上,设定了上下前后四个联动键开关,就可以轻松操作机械手臂的整体动作。为了使联动过程中具有个体动作的调整和配合,在操作面板上单独设有夹钳开闭、腕转左旋右旋、小臂向上向下、中臂向上向下、大臂向上向下、腰转(回转)向左向右的按键开关。这样联合行动和单独控制动作可以各自操作,也可以相互穿插操作。如在联动时,机械手臂的各关节臂杆象人的手臂一样向爆炸物运动,这时要小臂向下运动一下更合适,只要点按一下小臂向下的键开关即可。图4是Super-DⅡ型排爆机器人的工作装置在做联动动作,这个动作是小臂始终要保持水平并向前运动,则大臂、中臂及各关节就要自动调节各自的位置以确保小臂水平向前运动。
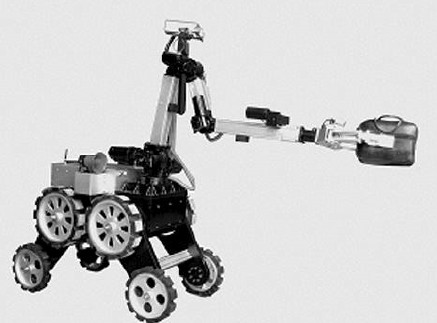
图4 联动时小臂水平并前伸
2.回转功能
回转功能是指排爆机器人的工作装置在车体上进行±90度的往复转动。没有回转功能的机器人在机械手抓取爆炸物时的左右定位,或抓取爆炸物后要向左右方向放入防爆筒中时,工作装置不能自身转动,只能靠行走装置(车体)左右移动来实现。行走装置有轮式和履带式两种,由于接地面积大,摩擦阻力大,左右移动时,是跳跃式的较大位移,达不到平稳转动,尤其是小位移很难控制,往往几个回合才能定位。另外,在一些狭窄地段、壕沟、有障碍物等案发现场排爆时,由于行走装置受环境所限不能转动或转动很不方便,给排爆工作带来了很大困难。Super-DⅡ型排爆机器人在行走装置的车体上与工作装置之间采用了回转机构。回转机构是由电机减速器、回转轴、滚动轴承、推力轴承共同组成,其摩擦系数微乎其微,转动平稳灵活,即使很小的位移也能控制,克服了无回转功能的排爆机器人的不足。图5是Super-DⅡ型排爆机器人在行走装置不动时,工作装置转动90度时抓取爆炸物的状态。
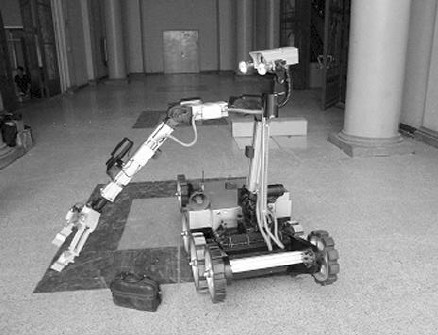
图5 工作装置转动90度
3.臂杆六自由度工作装置的几种功能用途
一般排爆机器人是两节臂杆,有许多动作做不到位或达不到要求。Super-DⅡ型排爆机器人采用了三臂杆六自由度的工作装置,最大伸展长度1.8米,尽管在机械设计和控制系统上带来了一定难度,同时经济成本有所提高,但其优势功能和灵活性是肯定的,为排爆工作带来了诸多方便并将发挥更广泛的作用。下面仅举几例说明。
(1)图6是Super-DⅡ型排爆机器人工作装置处于地面水平状态时的位姿。这种姿态使机器人可以伸入汽车底部或各种物体的底部进行摄像侦察及抓取可疑物品。在动作时,大臂向下,中臂水平,小臂略向上。这种位姿对物体的底部侦察是行之有效的。
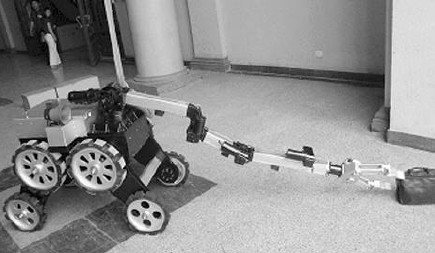
图6 工作装置处于地面水平状态
(2)图7是Super-DⅡ型排爆机器人大臂向上,中臂接近水平,小臂垂直地面的一种姿态。这种姿态便于机器人从筒状容器抓取爆炸物或将爆炸物抓取后放入防爆罐和车载防爆球罐 中。同样,大臂、中臂、小臂向下时,机器人的车体在地面上,工作装置可以在沟中、坑中进行排爆工作。
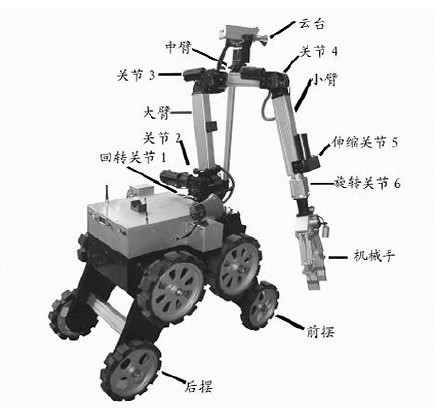
图7 筒状容器中抓取或投入爆炸物
(3)图8是Super-DⅡ型排爆机器人行走装置不动时(进入沟中或低洼处),手臂90度转到一侧时的姿态。这种状态是在车体转动不方便时,手臂在±90度的范围内照样可以进行排爆工作。

图8 回转90度时进行排爆工作
4.机械手
图9是Super-DⅡ型排爆机器人的机械手。该机械手采用蜗轮蜗杆传动机构使手指张开闭合,手指采用带有V型槽的双指结构,最大张开口径为250毫米,手臂最大伸展长度时抓取重量 10公斤。机械手安装在小臂杆的端部,借助小臂杆端部的两个自由度,可以360度左右任意旋转和在180毫米内进行直线型伸缩 。

图9 机械手
机械手的伸缩功能在排爆工作中有很大的用途。在一些诸如墙壁上的洞中、地面的坑中、汽车后备箱中、汽车底盘下、各种容器中等一些狭窄且活动范围不大的空间中若放有爆炸可疑物品,由于臂杆运动使机械手在小范围空间内做直线运动有较大限制,这时机械手不需上下左右摆动,就可以直线伸缩运动来完成特定环境中的抓取工作,如在墙壁上有一洞孔中放有爆炸可疑物品时,当臂杆对准孔的位置时,机械手就可以伸进洞中将物品抓出来。
5.行走装置
Super-DⅡ型排爆机器人的行走装置采用四轮驱动和双摆驱动,行走速度每分钟0-40米,爬坡能力40度,能在1.3米的范围内原地回转。
该行走装置的前后摆可以同时上升同时下降,也可以分别上升下降,上升角度30度,下降角度90度。前后双摆同时下降90度时,将车身整体抬高500毫米,使工作装置的工作面抬高700毫米,同时机械手向垂直方向的抓取高度也提高700毫米。前后双摆配合四轮驱动可以爬楼梯(图10)越过300毫米高300毫米宽以内的障碍物(图11),并可以越过300毫米宽的壕沟。

图10 爬楼梯

图11 过障碍物
行走装置的操作方便简单,在操作面板上有前摆上下开关、后摆上下开关,前进、后退、左转、右转由一个旋转摇杆开关控制。
三、武 器 系 统
Super-DⅡ型排爆机器人的武器系统采用的是38毫米无后坐力爆炸物销毁器(图12),俗称“水炮枪”。爆炸物销毁器主要由枪身、枪弹、电发火装置组成。枪身的前端装水,后端装电发火弹,电发火弹的发火电压3-9伏,发火电流1安培,只要按动起火装置,电发火弹的火药就会被点燃产生强大的高压气体,高压气体使枪膛中的水形成高压并以高压射流的形式在极短的时间内射向爆炸物,使爆炸物的外包装及内部组件受到破坏和解体并失去爆炸的可能性(在正常情况下,爆炸物的雷管和炸药不会因此而爆炸),达到既保证排爆人员、机器人的安全,又能排除爆炸物的目的。因此,爆炸物销毁器是排爆机器人和排爆专业人员的武器之一。如果说排爆机器人没有了爆炸物销毁器,就失去了一半作用,再没有了机械手就完全失去了作用。

图12 水炮枪
爆炸物销毁器最初单独应用在排爆工作中,由排爆专业人员手工操作摧毁爆炸物(见图13)。随着排爆机器人的出现,它被安装在排爆机器人的手臂上。Super-DⅡ型排爆机器人配装的爆炸物销毁器有两种,一种是单枪管,一种是双枪管(图14),每个枪管配有双路激光瞄准器,对爆炸物进行瞄准定位。销毁器上装有一只摄像机,使排爆操作人员在远离几十米以外的视频显示器就可以看到销毁器与爆炸物之间的位置关系,只要按动操作面板上的点火开关就可以准确的摧毁爆炸物。

图13 爆炸物销毁器摧毁爆炸物场景
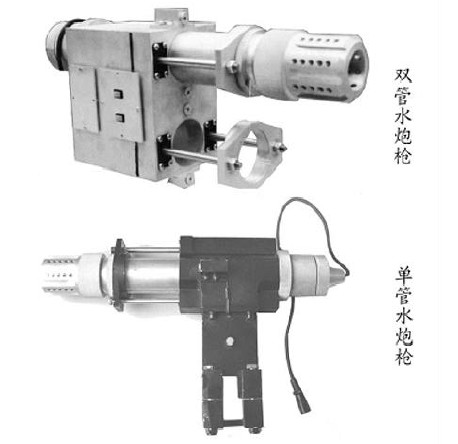
图14 Super-DⅡ型排爆机器人 配备武器类型
四、视频监控系统
Super-DⅡ型排爆机器人采用四个低光CCD摄像头视频监控系统。机械手上安装一个,爆炸物销毁器上安装一个,车体前安装一个,车体上最高处的云台上安装一个,这四个摄像头形成多方位的立体摄像观察系统,通过无线或有线将观察到的画面传输到操作系统的视频显示器上,便于操作人员操作机器人工作。该视频监控系统采用四画面切换技术,可以单幅画面显示,可以四画面切换显示,也可以四画面同时显示。更为重要的是在排爆机器人上首次采用了录象设备,将整个排爆过程录象保存下来,作为案例分析、教学、存档、总结经验之用。
另外在语音系统上采用了双向对话,便于操作人员和机器人周围的排爆人员对话,或在反恐任务中,便于操作人员与恐怖分子对话。
五、操作系统
Super-DⅡ型排爆机器人操作系统采用无线遥控和有线两种操作形式兼而有之,操作看到销毁器与爆炸物之间的位置关系,只要按动操作面板上的点火开关就可以准确的摧毁爆炸物。
距离大于100米,动力电源采用24伏、60AH镍氢电池。整个操作系统安装在一个控制箱上(图15),控制箱上有操作面板、视频接收切换器、视频显示器、录像记录仪、语音通讯、遥控发射器、电源等。控制箱底部装有轮子便于推行,也可以两个人抬起行走。无线遥控或有线操作时,操作人员只要观看视频显示器上的机器人动作和爆炸物的位置,按动面板上的不同开关按键,便可操作机器人的排爆工作。机器人的排爆反恐任务是多方面的,每次排爆工作不尽相同,环境地形也不相同,因此为排爆机器人增设一定的智能化功能,如地形识别系统、自动避障系统、激光定位系统等是今后研究设计、生产制造市场化的方向。

图15 操作控制箱
分享到:
[来源:机器人技术与应用责任编辑:孙荣]

官方微信号:tezhongzhuangbei
立即关注特种装备网官方微信,
第一时间了解行业权威资讯和商机信息!
第一时间了解行业权威资讯和商机信息!

官方微博:特种装备网
关注我们,了解实时动态,与我们互动!





