













反恐排爆机器人的关键技术研究及主要性能分析(组图)
摘要:针对打击恐怖活动所要求的“快速部署、迅速展开、轻巧便携、地形和天候适应性强、功能模块扩展方便、搭载能力强”等技术特征,本文提出采用开放式架构的模块化机器人设计理念,以最终的实用化、商品化和产业化为目标,对排爆机器人的关键技术做了详细研究,并基于这些关键技术研制出系列化的排爆机器人。
关键词:反恐排爆机器人 开放式架构 模块化
当今恐怖分子为了实现自己的政治目的,多将爆炸恐怖袭击对象选定为防范能力较弱而人口又较密集的商业及平民,其性质往往极其残忍,社会影响极大。在这种国际形势下,反恐已成为国际共识,各国纷纷加大了对反恐的投入。研制出能实用化反恐排爆机器人极为迫切,世界各国尤其是发达国家都十分重视对反恐排爆机器人的研究。
排爆机器人(Explosive Disposal Robot)主要用于代替人到不能去或不适宜去的有爆炸危险等环境中,在事发现场进行侦察、排除和处理爆炸物等危险品[1]。有时也对一些恐怖分子及犯罪分子实施有效的攻击,是反恐专业队伍中必不可少的重要装备[2]。它应具备对突发事件快速反应、机动灵活、部署迅速、全天候、全地形运行的能力,能够通过远程控制与先进的识别技术,及时发现爆炸物并排除危险,降低士兵人身的危险程度。
1 排爆机器人的几项关键技术
国内外已经有多款排爆机器人产品,并且已经实战应用。无论是国外还是国内,在排爆机器人技术设计上,均融合了行走技术、传感器技术、信息处理与控制技术、通信技术、执行与搭载技术。
(1)行走技术
反恐排爆机器人的行走机构主要有轮式、履带式或二者相结合的轮履式等。轮式行走机构结构简单,重量轻,滚动摩擦阻力小,机械效率高,适合在较平坦的地面上行走,但由于轮子与地面的附着力不如履带式机器人,因而越野性能也不如履带式,特别是爬楼梯、过台阶时就比较困难。英国ABP 公司生产的“山猫”、“土拨鼠”及“野牛”等都是采用这种行走机构。履带式行走机构的优点是越野能力强可以爬楼梯、越过壕沟等各种障碍物。德国TELEROB 公司生产的TEODOR 排爆机器人和可穿越狭窄地域的TELEMAX 小型排爆机器人,我国自主研发的uBot-EOD等排爆机器人都是采用这种行走机构。轮履式行走机构可同时装有轮胎和履带,当机器人在较平坦的环境移动时,使用轮式,以获得较快的移动速度,当机器人需要爬楼梯等障碍物时,使用履带式,以提高其越障能力。美国Wolstenholme机器公司生产的MR5排爆机器人就是采用这种行走机构[4]。
为了加快开发多种不同功能的机器人,有些公司将行走机构模块化,可以快速替换和安装,如Packbot机器人以及uBot-EOD机器人。
(2)传感技术
传感技术主要是对机器人自身方位信息以及外部环境信息的检测和处理。反恐排爆机器人为了应付各种危险情况往往会配备摄相机、昼夜瞄准具、微光夜视瞄具、双耳音频探测器、化学探测器、微型定位系统、视红外传感器、超声传感器等。
(3)信息处理与控制
信息处理与控制是以计算机为中心,主要用于提取、识别和分析判断获得的关键信息,建立机器人任务模型,供控制和决策人员选择。现有的排爆机器人大多是半自主移动与遥控方式相结合,机器人在人的监视下自主行驶,在遇到困难或者需要执行特定任务时操作人员进行遥控操作。如以色列TAAS 有限公司研制的TSR-150 反恐机器人,我国的uBot-EOD系列机器人就能进行有限的避障和自主导航。到了90 年代,一些移动机器人逐渐向自主型发展,即可依靠自身的智能自主导航,躲避障碍物,独立完成各种排爆任务[5]。 机器人研究者需要融合多种传感器信息,并设计一些导航算法,以实现机器人在非结构化环境中的全自主行走。
(4)通信技术
通信系统的主要任务是完成机器人与控制平台之间的信息传递,使得操作人员能够获得更多的关于现场和机器人自身状态、动作的信息,从而有效地监控机器人,实施遥操作。通信方式由有线发展到无线,由无线电、雷达发展到光缆,传输距离也越来越长。当前采用最多的是无线加有线的双重通信方式,通过无线局域网来遥控机器人,在危机情况下借助有线控制方式,以免受到无线干扰而造成任务失败。
(5)执行与搭载技术
反恐机器人一般具有排除爆炸物、解救人质、消防、搬运、摧毁、射击等功能,因此要求机器人能装载多种武器装备,以便根据不同的任务需要进行选择。多自由度机械手是最常用的搭载执行机构,用它的手爪或夹钳可将爆炸物的引信或雷管拧下来,并把爆炸物运走。猎枪或霰弹枪,高压水枪,特殊的冷冻装置,催泪弹、烟幕弹及发射器械、冲锋枪、步枪等单兵反恐防爆武器也可以根据需要进行搭载。
2开放式架构和模块化技术
作为反恐用的排爆机器人都要求高可靠性、高稳定性、易维护性、易配置性,近年来随着模块化开放式技术的发展,突破了传统封闭架构体系的缺点,更加强调结构化、易开发性、易配置性、易扩展性、易交互性、易移植性、易裁剪性和易复用性。如何在反恐排爆机器人中引入开放式架构的模块化技术,开始越来越引起国内外研究人员的高度关注。
开放式架构机器人的概念主要是针对封闭式架构机器人所存在的缺点而提出。从机器人设计的角度分析,机器人的设计过程首先要根据确定的功能需求与作业环境设计机器人的硬件主体,然后根据硬件配置相应的控制软件。在这种设计架构理念下,所有的硬件控制都交给主控软件完成,硬件和软件必须要通盘考虑,完成不同功能的部件之间在软件上是一种紧密耦合的关系,在一台机器人上使用的编程代码,几乎不可能在另一台新开发的机器人上发挥作用,如果想开发新的机器人,就必须从头开始,移植性和重用性较差,这样所形成的机器人是一种封闭式架构的机器人。这种封闭式机器人由于采用的是专用计算机、专用机器人语言、专用微处理器,结构封闭式,机器人的应用上受到了很多限制,无论是硬件还是软件,兼容性较差,功能和配置上难以扩充和更改。
所谓开放式架构的机器人,所包含的概念有软件与硬件开放两个层面。其主要的技术关键为模块化,即通过模块化技术的引入,使不同组件通过统一的硬件和软件接口,解除机器人各个部件之间的紧密耦合性,可以轻而易举地重复使用硬件和软件的模块。这种模块化的特征可以保证机器人不再受制于固化的特定本体参数,从而可以根据不同情况适当地调整某个或某些参数,以避免或减少这种性能的降低。模块化的特征是实现开放式架构的基础,可以保证机器人的性能,便于系统维护与功能模块更换和扩展,并可以提高机器人对复杂工作情况的适应能力[6]。
在结构层面上,目前在机器人模块化方面,国外对可重构机器人系统已经进行了大量的研究,目前已经开发的模块化机器人系统或可重构机器人系统主要有两类[7-15];一类是动态可重构机器人系统,另一类是静态可重构机器人系统。在研究内容的层面上,在开发具有开放式结构的模块化、标准化机器人控制系统方面,国外的研究主要集中在功能的划分、功能之间的信息交换规范以及功能实现的方法上[16-20]。
经过几年来国内机器人行业研究人员的共同努力,我国机器人的研究水平将从低端产品阶段,开始进入高端技术领域的研究。我国的反恐排爆机器人已经走出实验室的研究阶段,逐渐走向了产业化和实用化。我国的学者也已经在此方面进行了许多研究[21]。
3基于开放式架构的模块化排爆机器人的关键技术研究
针对打击恐怖活动所要求的“快速部署、迅速展开、轻巧便携、地形和天候适应性强、功能模块扩展方便、搭载能力强”等技术特征,基于开放式架构,基于模块化与即插即用技术的研究成果,我们建立了反恐排爆机器人的四大单元子系统,即适应全天候、全地形的机器人移动平台、多自由度手臂、多自由度监控云台及远程操控终端,系统框图如图1[22]。
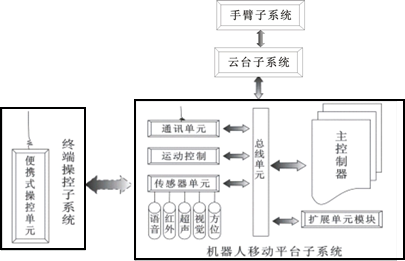
图1 反恐排爆机器人系统框图
其关键技术在于:
(1)通过智能机器人功能的分布式研究,通过运动单元、驱动单元、控制单元、信息感知单元的模块化,构建允许第三方参与的开放式机器人架构。
(2)实现以即插即用技术为基础的硬件技术、接口技术、通讯技术以及软件技术,方便后续扩展的功能模块与搭载设备的即插即用,方便用户根据自身需求增减功能模块。
(3)通过分析多传感器获取的冗余检测信息,通过多传感器信息融合技术的研究,提高系统在复杂、动态、不确定或未知环境下决策信息的准确性,从而提高整机系统的安全性与可靠性。
(4)通过多模态智能人机交互技术的研究,利用图像处理、计算机视觉、语音交互、姿态与位置识别技术进行人机控制界面设计,提高系统交互功能,实现对反恐排爆机器人的智能化控制。
4 智能排爆机器人性能分析
基于以上关键技术的研究,我们研制出基于智能传感器、多模态智能人机交互、多传感器信息融合技术的模块化反恐排爆机器人。
uBot-EOD系列产品架构全开放、模块互通互连设计、全天候与全地形运行,有小型、中型和大型排爆机器人(以机器人手臂抓取的负载力来区分)三个不同性能的产品,如图2所示。

(a) 智能小型排爆机器人uBot-EOD A10:3-8kg

(b) 智能中型排爆机器人uBot-EOD A20:6-15kg

(c) 智能大型排爆机器人uBot-EOD A50:15-30kg
图2 uBot-EOD系列排爆机器人
排爆机器人的机器人移动本体可以采用轮式、履带式和轮履复合式行走机构,其中小型排爆和中型排爆采用了履带式机构,以适应35°以上的楼梯;大型排爆采用了轮履复合式机构,既能攀爬楼梯,又能保证在平地上1.0m/s以上的高速行驶。机械手臂为6个以上自由度,末端执行机构可以更换不同类型的手爪,方便执行不同的任务。监控云台是2个或3个自由度,主要用于环境检测。远程操控平台有便携手持式OCU及箱式OCU两种,如图3所示,方便不同场合下的使用。

(a) 便携手持式OCU
8英寸液晶屏,1kg重

(b) 箱式OCU
12英寸液晶屏,10kg重
图3远程操控平台
独立的功能模块之间采用标准的接口相互连接,标准接口包含了机械连接和电气连接。接口包含了电源和通信总线,采用标准接口连接的模块之间共用电源并通过标准总线通信,不需要任何外部连线,如图4所示。这样的设计实现了机械和电气的模块化,方便装卸多种模块,比如移动平台上可以选择装多种手臂、水炮枪、武器系统等。

图4 模块化系统,标准接口标准总线连接。
此外,在排爆机器人上安装多种内部传感器和外部传感器。内部传感器用于监测机器人系统内部状态参数,包含电压、电流、位移、温度、加速度、航向、俯仰角、翻滚角等信息的测量。外部传感器用于感知外部环境信息,主要包含红外、超声、激光、摄像头、GPS等。这些传感器用于机器人的自我安全保护、避障、自主定位和导航、监控巡航等功能。
综上所述,为了进一步实现排爆机器人产品在实际应用中的高效性能,我们提出采用开放式架构的模块化机器人设计理念,并以最终的实用化、商品化和产业化为目标,研制出基于开放式架构的模块化反恐排爆机器人。基于开放式架构的模块化反恐排爆机器人在设计理念上实现了机械、电子和软件的模块化及标准化,极大的降低了开发成本、缩短了开发周期、方便产品的更新换代,易于实现客户的定制化,使用时易于快速更换配件快速部署。机器人设计技术的突破将推动国内高新技术的发展,提升我国在高科技产业发展方面的竞争力,并推动我国军用、警用与反恐用机器人事业的发展。
参考文献[1]李科杰.危险作业机器人发展战略研究. 机器人技术与应用. 2003,5:p14~22
[2]范路桥,姚锡凡. 排爆机器人的研究现状及其关键技术. 机床与液压. 2008,6: p139-143
[3]杨德智,明守远. 地面排爆机器人的应用. 机器人技术与应用. 30-36. 2004.4
[4]莫海军,吴少炜. 排爆机器人及相关技术. 机器人技术与应用. 31-36. 2005.4
[5]机动灵活的排爆机器人TSR200. 机器人技术与应用.26. 1996.3
[6]卢秋红等. 基于开放式架构的反恐排爆机器人关键技术分析.上海电机学院学报,2009,Vol12,No.3
[7]刘明尧,谈大龙,李斌.可重构模块化机器人现状和发展. 机器人,2001, 23(3): 275-279.
[8]Pamecha A, Chirikjean G. A useful metric for modular robot motion planning. IEEE Proc of Int Conf, On Robotics and Automation, 1996: 442-447.
[9]Kotay K, Rus D. Locomotion versatility through self-reconfiguration. Robotics and Autonomous Systems, 1996, 26:217-232.
[10]Yin M. New locomotion gaits. IEEE Proc of Int Conf, On Robotics and Automation. 1994:2508-2514.
[11]Murata S, Kurokawa H, Yoshida E, Tomita K, Kokaji S. A3-D self-reconfigurable structure. IEEE Proc of Int Conf, On Robotics and Automation, 1998:432-439.
[12]Benhabib B, Dai M. Mechanical design of a modular robot for industrial application. Journal of Manufacturing Systems, 1991, 10(4): 297-305.
[13]Paredis C J J, Khosla P K. Kinematic designs of serial link manipulators from task specification. The International Journal of Robotics Research, 1993, 12(3): 274-287.
[14]Hui R, Kircansk I N, Goldenberg A, et al. Design of iris facility: a modular, reconfigurable and expandable robot test bed. IEEE Proc of Int Conf, On Robotics and Automation. 1993:155-160.
[15]Fujita M, Kitano H, Kageyama K. A reconfigurable robot platform. Robotics and Autonomous Systems, 1999, 29: 119-132.
[16]杨振中,周骥平,朱兴龙. 基于解耦型球关节的工业机器人控制系统研究初探. 制造业自动化,2006,28(7):31-35.
[17]Albus J S, Mccain H G, Lumia R. NASA/NBS standard reference module for telerobot control system architecture. Nist Technical Note, 1989, 1235.
[18]William E F. What is an open architecture robot controller. 1994 IEEE International Symposium on Intelligent control, Columbus, USA, 1994.
[19]Saridis N N. Architecture of intelligent control. IEEE Symposium on Implicit and Nonlinear Systems. 1992.
[20]Stewort D B, Volpe R A, Khosla P K. Integration of real-time software modules for reconfigurable sensor-based control system. Proceedings 1992 IEEE/RSI International Conference on Intelligent Robots and Systems, Raleigh, NC. 1992.
[21]王越超, 王旭, 谈大龙. 精密1号装配机器人控制器的设计与实现. 机器人, 1997(1).
[22]卢秋红. 基于开放式架构的模块化排爆机器人关键技术研究. 上海交通大学 博士后出站报告,2011,7
分享到:
[来源:上海合时智能科技有限公司责任编辑:胡婷婷]

官方微信号:tezhongzhuangbei
立即关注特种装备网官方微信,
第一时间了解行业权威资讯和商机信息!
第一时间了解行业权威资讯和商机信息!

官方微博:特种装备网
关注我们,了解实时动态,与我们互动!





